BRUSH MOTOR SPEED CONTROLLER
Regulator służy
do zmiany poziomu mocy silnika szczotkowego DC. Został on
zaprojektowany i zbudowany do regulacji silników prądu stałego
DC używanych do napędu modeli samolotów.
Wielkoscią wejściową regulatora jest sygnał standardowo dostępny na
wyjściu odbiornika modelarskiego, czyli
impulsy o czasie trwania 1-2ms i okresie powtarzania 20ms. Przebiegiem
wyjściowym regulatora jest przebieg PWM (Pulse Width Modulation) o
częstotliwości ok. 8kHz i wypełnieniu regulowanym w zakresie 20-100%.
Regulator, po odpowiednim zaprogramowaniu, prawidłowo
współpracuje ze wszystkimi dostępnymi obecnie ogniwami używanymi
w modelarstwie, czyli NiCd, NiMh, Li-Ion oraz Li-Pol.
Poniżej zamieszczam film z lotu modelu Mitsubishi "ZERO" zbudowanego z zestawu GWS. Opisany tutaj regulator steruje pracą napędu typu GW/EPS-350C
z przekładnią "B", czyli o przełożeniu 1:4.33 . Współpracujące z napędem śmigło to GW/EP9070. Źródło zasilania to pakiet Li-Pol o napięciu znamionowym 7.4V i pojemności 1700mAh.
W takiej konfiguracji śmigło osiąga obroty ok. 5700obr/min a pobór prądu wynosi ok. 10A. Czas lotu ok. 20 minut.

!!! rozmiar pliku to ok. 5 MB !!!
PARAMETRY REGULATORA
- zasilanie - 5-9 ogniw NiCd, NiMh lub 2-3 ogniwa Li-Pol;
- maksymalny prąd 20A;
- rezystancja w stanie włączonym - ok. 4mΩ
- wbudowany BEC (Battery Eliminator Circuit) 5V/1A;
- Li-Pol READY;
- wymiary 20x11x7mm
- waga z przewodami ok 8g;
- częstotliwość PWM: ok.8kHz;
- dopuszczalny zakres szerokości impulsów z odbiornika: 0.9-2.1ms;
- zabezpieczenie przed przypadkowym uruchomieniem, tzw. "FAILSAFE"*;
- regulacja poziomu napiecia pakietu zasilającego, przy którym następuje ograniczenie mocy silnika;
- wyłączanie silnika w przypadku utraty zasięgu "OUT OF RANGE"*
- płynne
zwiększanie mocy silnika zapobiegające przeciążaniu pakietu
zasilającego, nadmiernemu wypalaniu szczotek silnika i obciążaniu
przekładni
* należy zaznaczyć, że istnieje prawdopodobieństwo, że na
wyjściu odbiornika pojawią się impulsy odpowiadające prawidłowym i
regulator wysteruje silnik pomimo braku transmisji z naszego nadajnika,
więc funkcje "FAILSAFE" i "OUT OF RANGE" należy traktować jako awaryjne
i nie gwarantujące bezpieczeństwa użytkowania zespołu napędowego.
Regulator ma możliwość ustawienia podstawowych parametrów
mających istotny wpływ na poprawną pracę zespołu napędowego modelu, w
tym:
- ustawianie
minimum i maksimum gazu - szerokość impulsu odpowiadającego minimum i
maksimum gazu jest wartością indywidualną dla każdego nadajnika.
Możliwość ustawiania tych parametrów daje możliwość
wykorzystania pełnego zakresu ruchu drążka do regulacji mocy, a
jednocześnie zapewnia pełne wysterowanie silnika przy położeniu drążka
w pozycji "pełny gaz";
- możliwość
ustawienia poziomu napięcia pakietu zasilającego z krokiem 1V, przy
którym regulator zacznie ograniczać moc napędu i nie dopuści do
dalszego spadku napięcia pakietu. Jest to szczególnie ważne w
przypadku stosowania pakietów złożonych z ogniw Li-Ion i Li-Pol,
w przypadku których kryteria spadku napięcia na pakiecie są
szczególnie rygorystyczne, a ich nieprzestrzeganie grozi nie
tylko uszkodzeniem pakietu, ale również wybuchem lub pożarem;
- regulator
nie pozwala na uruchomienie silnika w przypadku nie zachowania
prawidłowej kolejności włączania elementów zestawu*;
- regulator wyłącza silnik w przypadku stwierdzenia utraty zasięgu*;
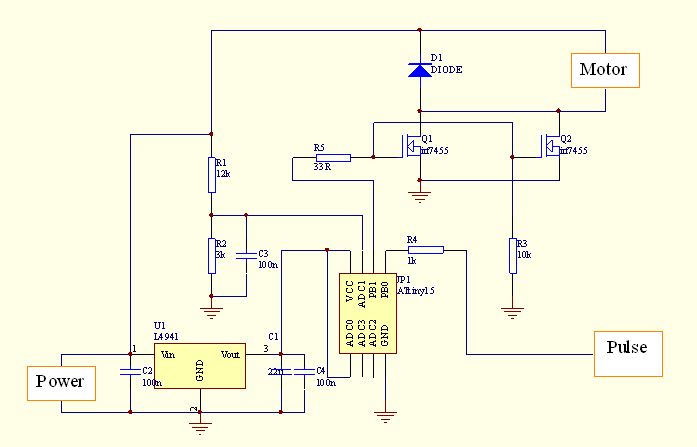
SCHEMAT
Jak widać jest to
bardzo podstawowa aplikacja regulatora PWM. Całość "inteligencji"
regulatora zawarta jest w programie uC. W moich regulatorach ta
nieopisana na schemacie dioda to BYV28-150. Dodatkowo celowe jest
użycie podobnej diody przylutowanej bezpośrednio do złączy silnika,
szczególnie dla silników klasy 480 i większych. Na razie
nie umieszczam na stronie obrazów płytki drukowanej, bo została
ona zaprojektowana pod elementy SMD i to w dodatku rozmiaru 0603, więc
bądź co bądź niezbyt duże :-). Schemat jest jednak dosyć prosty i
myślę, że każdy zainteresowany sam sobie może zaprojektować odpowiednią
płytkę, lub nawet polutować układ na tzw "pająka", ale to raczej do
celów testowych, bo nie polecam wkładania
prowizorki do modelu latającego.
Pewien problem może stanowić zdobycie µC atTiny15 ponieważ nie ma
go już w ofercie ATMEL'a. Następcą jest µC atTiny25, ale jeszcze
go nie mam. Jak go zdobędę, to dostroję program do tego µC i
zamieszczę na stronie.
Wsad do µC atTiny15 jest TUTAJ**
Wsad do µC atTiny25 będzie TUTAJ**
**
Zezwalam na wykorzystanie programu regulatora do celów
niekomercyjnych. Komercyjne wykorzystanie wsadu µC wymaga mojej
pisemnej zgody
Pewnego
komentarza wymaga zaprogramowanie µC. Ponieważ w przypadku tej
aplikacji dosyć krytyczne są zależności czasowe, to do komórki o
adresie 3F(hex) pamięci EEPROM
µC należy wpisać wartość bajtu kalibracji wewnętrznego
oscylatora. W posiadanych przeze mnie µC wartość ta była
fabrycznie zapisana pod ww. adresem, ale nie wiem, czy jest to reguła,
czy tylko niektóre partie tak mają.
Dodatkowo należy włączyć układ "Brown-out Detection" i ustawić poziom resetu na 2.7V.
PROGRAMOWANIE REGULATORA
| !!! |
Ze
względów bezpieczeństwa pierwsze programowanie regulatora należy
przeprowadzić bez śmigła (innego napędzanego silnikiem mechanizmu) |
!!! |
Programowanie musi się odbywać z dołączonym do regulatora silnikiem.
Aby wejść do trybu SETUP'u należy ustawić drążek nadajnika w pozycji
"pełny gaz" a następnie podłączyć regulator do źródła zasilania.
Po ok. 10s usłyszymy długi pisk. Od tego momentu w czasie
nie dłuższym niż 3s musimy cofnąć drążek gazu do pozycji "bez gazu".
Kolejny długi pisk informuje nas o wejściu do trybu programowania
(jeżeli nie cofniemy drążka w czasie tych 3s, regulator przejdzie w
tryb normalnej pracy). Pierwszym ustawianym parametrem jest maksymalne
wychylenie drążka gazu. Ustawiamy drążek w pozycję "pełny gaz" i
czekamy na trzy krótkie piski. Następnie cofamy drążek do
pozycji "bez gazu" i znowu czekamy na trzy krótkie piski.
Właśnie zaprogramowaliśmy pozycję minimalnego położenia drążka.
Kolejnym programowanym parametrem jest poziom napięcia, przy
którym regulator zacznie ograniczać moc silnika niedopuszczając
do spadku napięcia pakietu poniżej ustawionej wartości. Przesuwamy
drążek w pozycję "pełny gaz" i odliczamy piski. Każdy pisk oznacza 1V
progu ograniczenia.
Próg jaki należy ustawić dla poszczególnych
rodzajów pakietu zawarte są w poniższej tabeli (są to wartości
rekomendowane przeze mnie i wynikające z mojego doświadczenia, ale
każdy może ustawić poziom ograniczenia według własnego uznania)
|
Rodzaj Pakietu
|
Napięcie ograniczenia [V]
|
Ilość pisków
|
|
Li-Pol 11.1V
|
9
|
9
|
|
Li-Pol 7.4V
|
6
|
6
|
|
5 ogniw Ni-Cd/Ni-Mh
|
4
|
4
|
|
6 ogniw Ni-Cd/Ni-Mh
|
5
|
5
|
|
7 ogniw Ni-Cd/Ni-Mh
|
6
|
6
|
|
8 ogniw Ni-Cd/Ni-Mh
|
7
|
7
|
|
9 ogniw Ni-Cd/Ni-Mh
|
8
|
8
|
Po odliczeniu
wymaganej liczby pisków cofamy drążek do pozycji "bez gazu" i
czekamy na sygnał gotowości do pracy. Procedura programowania
regulatora została zakończona
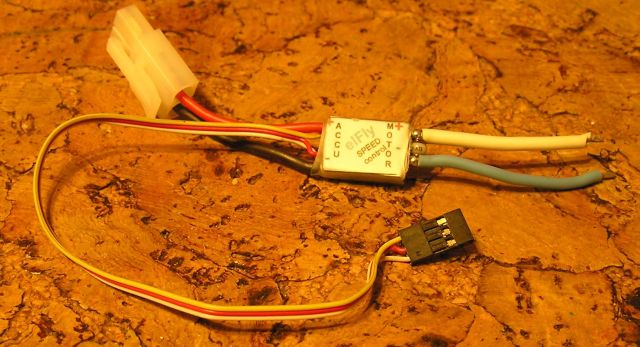
Zbudowałem kilka takich regulatorów i teraz używam ich w zdalnie
sterowanych łódkach mojego syna oraz jeszcze niekiedy w jakimś
samolocie. Poniżej kilka zdjęć "mojej wersji" regulatora